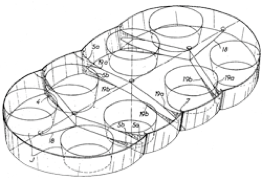
Société Bertin
SEDAM
Naviplane N300-X
Cliquer les vignettes pour agrandir l'image